


近日,中国科学院沈阳自动化研究所协作机器人研究团队提出了一种基于有限元子结构法和正交设计的协作机器人全域多目标优化设计方法,该方法以机器人弹性变形、固有频率以及质量等多种性能指标为优化目标,解决了协作机器人结构优化中存在的位姿及非结构参数影响、多目标耦合、计算速度与精度平衡等问题,具有建模精度高、计算速度快、对各模块的复杂形状适应性好等特点,能够有效提高协作机器人的刚度及动态性能,相关成果发表于优化设计领域国际著名期刊《结构和多学科优化》(Structural and Multidisciplinary Optimization)。
在安全、轻质、大负载自重比的约束下要求机器人具有的较高的刚度与动态性能是协作机器人设计中面临的挑战,结构优化设计为解决这一问题提供了有效的途径。在该项研究中,研究人员采用全域弹性变形和一阶固有频率指标评价机器人的整机刚度和动态性能,进而提出了一种协作机器人全域多目标优化设计方法。
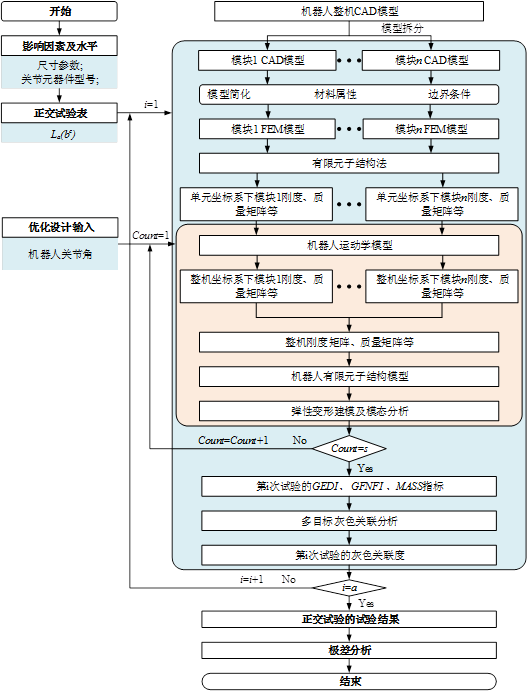
首先,通过建立机器人有限元子结构模型实时高效地获得机器人的多种全局性能指标,该建模方法能够在保证计算效率的同时保留有限元法的建模精度;其次,通过灰色关联分析法构建多目标优化函数,从多个单目标有效解中提取多目标的最有效解;然后,构建正交设计试验,求解在不同影响因素水平下的灰色关联度,在不减少优化参数的同时降低计算量;最后,通过极差分析获得最优影响因素水平组合,用于指导协作机器人的结构优化设计。基于上述方法,研究人员对所开发的SHIR5协作机器人进行了优化设计,结构优化后,机器人自重不变,刚度与动态性能得到了明显的提升,验证了本方法的正确性与有效性。
近年来,协作机器人研究团队在中科院重点部署项目、国家发改委新一代信息基础设施建设工程和“互联网+”重大工程项目等资助下,系统地开展了协作机器人机构和结构的优化设计方法研究,取得了一系列高水平的研究成果,为协作机器人的设计开发提供了理论依据和技术支撑。
(中国日报辽宁记者站)







 扫码下载
扫码下载 中文网微信
中文网微信